The center includes 35 AI researchers from core disciplines of computer science, information systems, statistics, and marine technologies with 40 AI application researchers from all faculties, including natural sciences, marine sciences, social welfare and health, social sciences, education, law, and humanities.
Our center established a well-proven mechanism for bringing together and supporting the dialog of core and application AI researchers from UoH, incentivizing them to work together on multidisciplinary translational research involving AI, and for educating and advising faculty and research students on AI methods and tools. Collaborations among UoH researchers led to impressive funding from competitive grants and industry. These activities also yielded journal papers, conference presentations, and attracted new students.
The researchers from the application domains raise important unmet needs that could be solved by new AI methods and technologies. Most of these real-world needs originate from collaborations with the public, private, healthcare, and the voluntary sectors; the AI models resulting from these research products are evaluated with real-world data and have great potential to translate into practical applications helping people and nature, going beyond scientific publications and grant awards.
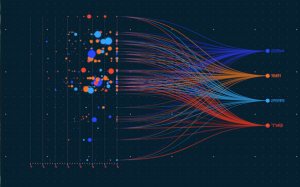
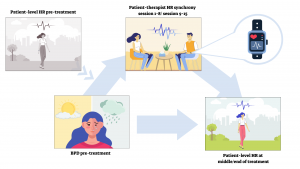
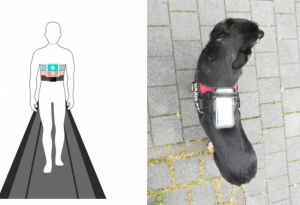
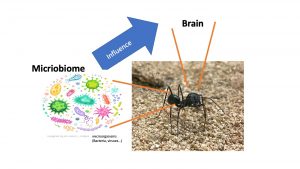
Examples include analyzing videos of therapists and patients for early detection of body language indicating fractures in trust, which is essential for successful therapy. Another example is tracking animal and plant species in the wild to estimate their decline and conservation. These successful projects started with seed multidisciplinary research support of modest grants, which are essential for proof of concept needed for writing external research proposals.
Yearly center activities include “ignite” event, mentor research students for selected projects, basic and advanced hands-on AI courses, tutorials, and workshops. We present about 4 colloquia and hold life-skill workshops for graduate AI students. We hold a community poster day / conference showcasing the results of AI research projects with best poster/paper student awards judged by the industry advisory committee and faculty members; 2 international researcher visits and an international conference or workshop.